


Research
|
AREAS |
|
|
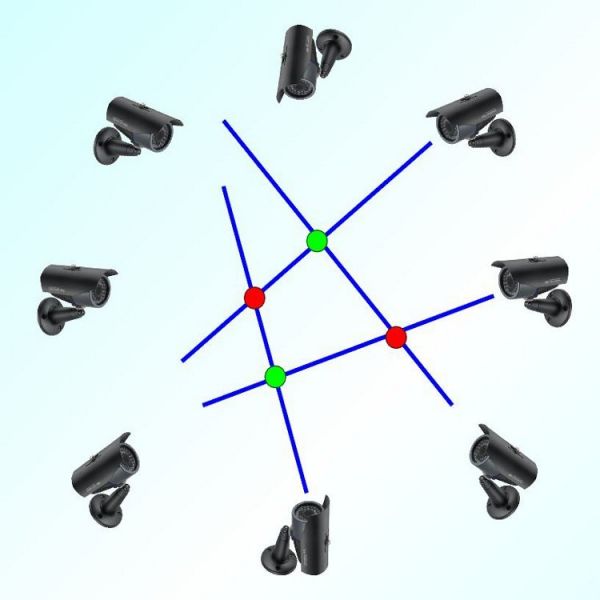
Large motion capture systems
This
project addresses the problem of reconstructing the 3D motion of
multiple objects moving within a predefined volume from the videos of
multiple cameras. In particular, the motion is captured by tracking a
number of unlabeled markers placed on each target object. Each camera
placed around the arena focuses only on a small portion of the total
volume to achieve high resolution, and each point of the arena can be
seen from multiple cameras to avoid cluttering. The motion of the
objects can be reconstructed only by combining the videos from all
cameras. Although motion marker-based motion capture is a well studied
problem, the main novel challenge reside in the need of performing the
3D motion capture from hundreds of cameras in real-time. This poses
severe problems due to obvious bandwidth constraints and to
computational constraints. Therefore, the goal of this project to devise
smart distributed tracking algorithms and adaptive cameras bundling
that can take advantage of smart cameras capable of autonomous
computation and communication to reduce both computational burden and
communication requirements.
Adaptive Optics
Adaptive optics (AO) is used in astronomy to obtain high resolution images, close to diffraction limited, of stars and galaxies with ground telescopes, otherwise blurred by atmospheric turbulence. In order to succesfully compensate for the distorsion induced by
athmospheric turbulence one (or more) deformable mirros are deformed;
the
control action used measurements of the wavefront distorsion.
Next generation AO systems have thousand of sensors and actuators
and as
such pose non-trivial issues both for modeling and control.
The research focusses on atmospheric turbulence modeling, simulation, and prediction. Multivariate Image Analysis (MIA)
The aim of MIA is the automation of some industrial and chemical processes. The goal of our research is generilizing and reducing the computational complexity of previously proposed techniques. |
|
COLLABORATIONS |